

Analyse der Landung der Raumsonde HAKUTO-R auf dem Mond, 2023-Apr-25
Mai 19, 2023Iban Cardona, Daniel Estévez, Peter Gülzow Edgar Kaiser, James Miller
©2023 Die Autoren
Zusammenfassung — ispace HAKUTO-R M1 sollte am 2023-04-25 16:40 utc auf dem Erdmond im oder in der Nähe des Atlas-Kraters landen. Doch das Signal von HAKUTO-R M1 brach um 16:45:09 Uhr UTC abrupt ab, und es war sofort klar, dass die Sonde nicht wie geplant gelandet war. Die letzten 88 Sekunden des Dopplerverschiebungsprofils deuteten auf einen freien Fall hin, gefolgt von einer zerstörerischen Landung auf dem Mond.
1. Beobachter
Mehrere interessierte Funkamateure beobachteten das Funksignal der Raumsonde vor und während des Ereignisses und trugen ihre Erkenntnisse zusammen. Dieses Papier ist eine Zusammenfassung.
Vor der Landung verfolgte Edgar DF2MZ http://df2mz.de mit einer 1,0-Meter-Antenne in der Nähe von Kiel die Entwicklung der Dopplerverschiebung während des gesamten Aprils und lieferte so wertvolle Informationen über die Entwicklung der Umlaufbahn vor dem 25. April. Am 18. April konnte er die Umlaufzeit von 7066 Sekunden und die Höhe von 100 km bestimmen, und am 21. April stellte er fest, dass die Umlaufbahn nominell polar war.
Am 25. April überwachte Iban EB3FRN mit einer 1,5-m-Antenne in der Nähe von Tarragona die Trägerfrequenz des Raumfahrzeugs mit einem softwaredefinierten Spektrumanalysator von Baudline mit hochauflösender Wasserfallanzeige. Abtastrate 2,5 Mio. Abtastungen/s, dezimiert auf 156250 Abtastungen/s und218 Punkt-FFTs.
Gleichzeitig überwachten James G3RUH und Peter DB2OS über die 20m-Antenne in Bochum, Deutschland, die Frequenz von (a) Hardware-Messungen und (b) zwei softwarebasierte Spektrumanalysatoren, ebenfalls mit Wasserfallanzeige. Letztere kann hier eingesehen werden:
https://www.youtube.com/watch?v=lfg23f9yyMo AirSpy
https://www.youtube.com/watch?v=Uqk3qVlBzaE Aaronia
Signalanalyst Daniel EA4GPZ lieferte einen Live-Expertenkommentar.
In den folgenden Tagen konnten wir durch die Zusammenführung von Informationen und Analysen die Ereignisse der letzten 25 Minuten der Flugbahn rekonstruieren.
Das endgültige Quellenmaterial, zu dem die einzelnen Personen beigetragen haben (nur der vollständige Bericht), ist in Ordnern mit den Bezeichnungen DB2OS, DF2MZ, EA4GPZ, EB3FRN und G3RUH enthalten und liegt hier als ZIP-Datei vor: Analyse der Landung der HAKUTO-R-Sonde
2. Verstehen von Frequenzmessungen
Diese Zusammenfassung sollte in Verbindung mit dem kommentierten Frequenzprofil der Station EB3FRN gelesen werden. Es handelt sich um eine “Wasserfall”-Anzeige des empfangenen Signals. Das Signal wurde ebenfalls aufgezeichnet, um es später genauer zu untersuchen.
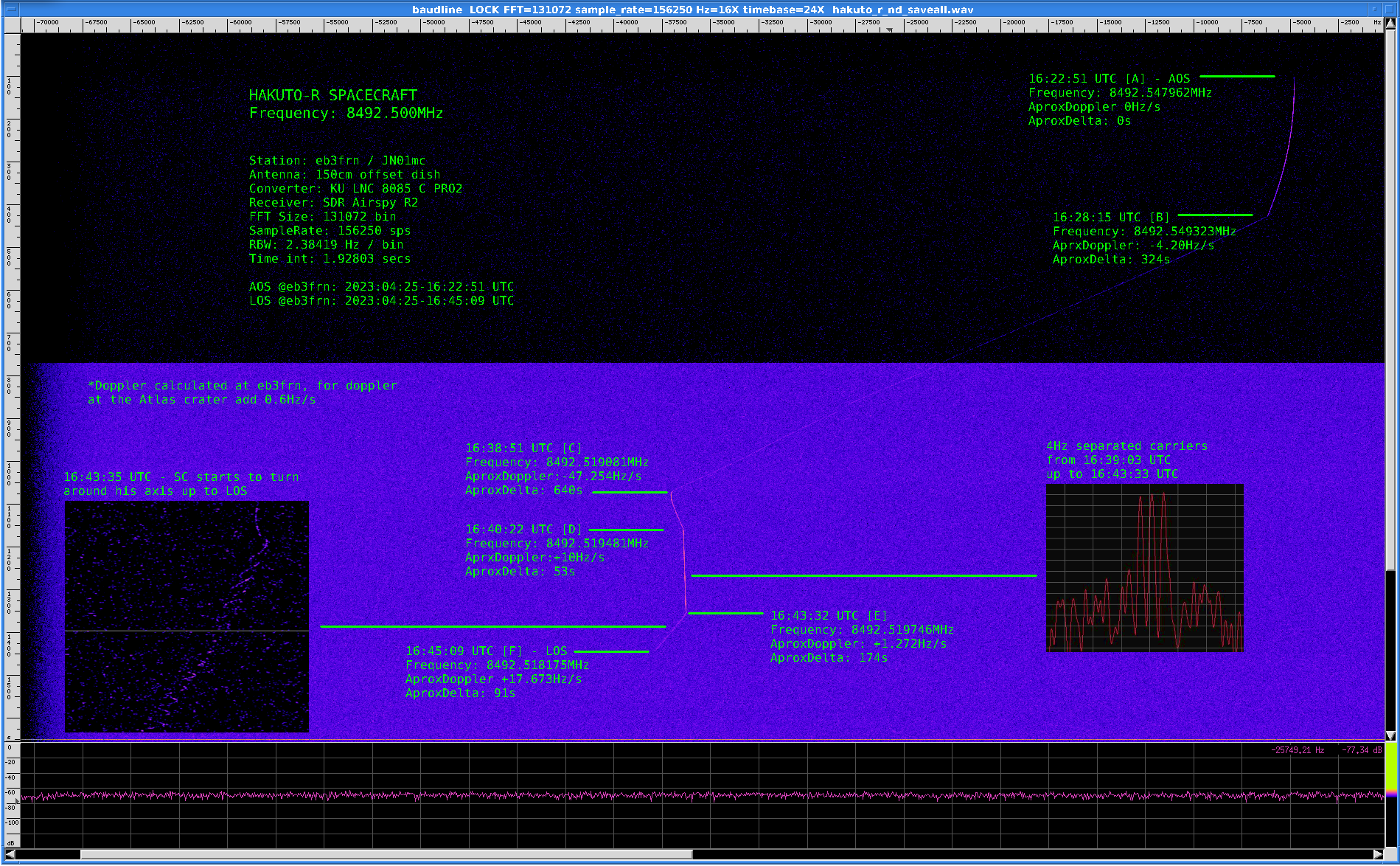
Abb. 01: Vollständige Aufzeichnung der Frequenz während der Landung mit Anmerkungen
Die Darstellung zeigt die vom Satelliten empfangene Frequenz (horizontal) gegen die Zeit (vertikal). Die Frequenz ist aufgrund der Dopplerverschiebung, die durch die Geschwindigkeitsänderungen des Raumfahrzeugs relativ zum Beobachter verursacht wird, nicht konstant.
Es ist wichtig, sich daran zu erinnern, dass 3D-Beschleunigungs- und Geschwindigkeitsbeobachtungen von der Erde aus gesehen, eindimensional, entlang der Erde-Mond-Linie erfolgen. Ein Objekt, das sich direkt entlang dieser Linie bewegt, zeigt also seine volle Geschwindigkeit an, während bei einer Bewegung senkrecht zu dieser Linie die Geschwindigkeit gleich Null zu sein scheint. Das Gleiche gilt für die Beschleunigung. Es ist also Vorsicht geboten, um die beobachteten Änderungen der Frequenzverschiebung mit der tatsächlichen Beschleunigung und Geschwindigkeit in Beziehung zu setzen.
Die Frequenzdarstellung (skaliert mit der Wellenlänge) ist ein Analogon der wahren Geschwindigkeit, die entlang der Sichtlinie Erde/Mond aufgelöst wird. Wenn Sie das Diagramm um 90° gegen den Uhrzeigersinn drehen, um die Zeitachse horizontal zu platzieren, erhalten Sie eine natürlichere Darstellung.
Die Steigung eines Abschnitts einer Messkurve ist gleichbedeutend mit der Beschleunigung. Ein Knick in der Aufzeichnung des angetriebenden Objekts bedeutet eine Lageänderung.
Zusätzlich zum Motorschub bewirkt die Schwerkraft der Mondoberfläche von 1,624 m/s2 immer eine Abwärtsbeschleunigung. Für den Beobachter verringert sich dieser Wert um den Sinus des Höhenwinkels der Erde über dem Mondhorizont. Etwa 0,6 m/s in unserem Szenario. Die Schwerkraft in 100 km Höhe beträgt 1,452 m/s2.
Bei der Visualisierung der Flugbahn ist es hilfreich, sich die Dinge so vorzustellen, als ob man mit dem Raumschiff unterwegs wäre, wobei man die Erde immer im Blick hat. Zu Beginn des Orbits, wenn man horizontal durch die Motorfront nach vorne schaut, befindet sich die Erde in einer Höhe von 26° über dem Horizont, Azimut 226° (45° nach rechts). Beim Abstieg, wenn man nun aus dem “oberen Fenster” schaut, scheint die Erde 64° von der Senkrechten entfernt zu sein.
Schließlich sieht das Frequenzprofil wie eine Reihe von Geraden aus. In der Realität nehmen die Übergänge nur eine begrenzte Zeit in Anspruch, und es ist unrealistisch, einen genauen Zeitstempel für den Beginn und das Ende der einzelnen Phasen zu erstellen. Bis auf den letzten!
3. Referenzdaten
MOON Physical GM/1012 4.903 m3/s2 Radius 1737.4 km Gravity 1.624 m/s2 HAKUTO Orbit Altitude 100 km Period 7066 s Speed 1634 m/s Angular vel. 3.06 °/min TX Wavelength 0.0353 m
4. Interpretation des Frequenzprofils
fig01.png zeigt fünf verschiedene Phasen des Frequenzprofils. Der Beginn jeder Phase ist mit A, B, C, D, E, F gekennzeichnet und wird einzeln besprochen.
Durch eine detaillierte Analyse hat EB3FRN die Frequenzänderung des Raumfahrzeugs über jede Periode berechnet. Somit sind die Beschleunigungen ungefähr:
Start End Duration Fdot Accel
UTC UTC s Hz/s m/s2
------------------------------------------------------
A 16:18:09 - 16:28:15 606 Bochum's AOS time
B 16:28:15 - 16:38:51 640 -46.654 1.6469
C 16:38:51 - 16:40:22 91 10.6 -0.3742
D 16:40:22 - 16:43:41 199 1.995 -0.0704
E 16:43:41 - 16:45:09 88 -18.561 0.6552 Free fall
F 16:45:09 LOS
------------------------------------------------------
Frequency profile B-E shows a descent-to-land process.
Bei ‘A’ taucht das Raumfahrzeug hinter dem Mond auf (AOS), das Triebwerk zeigt nach vorne.
Bei ‘B’ wird das Haupttriebwerk gezündet, um von der Orbitalgeschwindigkeit 1634 m/s abzubremsen.
Bei ‘C’ wird das Raumfahrzeug neu ausgerichtet, Triebwerk fast nach unten
Bei “D” kommt es zu einer leichten Änderung der Fluglage, und die Nettobeschleunigung ist nahezu null. Das Raumschiff wird jedoch weiterhin mit Abwärtsgeschwindigkeit fliegen. D-E-F’ sollte ein kontrollierter Abstieg zum Boden sein; ein gleichmäßiger Fall, Abbremsen und Aufsetzen.
Bei “E” hingegen ist das Profil das des freien Falls, und “F” ist die Folge.
4.1 Signal
Das Signalspektrum zeigte zwei Datenseitenbänder im Abstand von ca. 256 kHz, was auf einen 128-kHz-Zwischenträger hindeutet. Aus der Breite der Seitenbänder ergibt sich eine Symbolrate von etwa 15 ksym/s.
Während der langen Verzögerungsphase “B-C” war die in Bochum festgestellte Restträgersignalstärke sehr konstant, mit einem Träger-Rausch-Verhältnis (in 1 Hz) von 37,1 dB. Dies kann auf das Raumfahrzeug zurückgeführt werden, um die Restträgerleistung auf etwa 150 mW e.i.r.p. zu schätzen.
4.2 Angetriebener Abstieg
4.2.1 Abschnitt B-C
Der Motor läuft an und die Geschwindigkeit wird reduziert. Die Höhe nimmt nun aufgrund einer vertikalen Komponente des Schubs ab, und die Umlaufgeschwindigkeit ist für die Höhe zu gering.
Nach etwa 6/10 des Abschnitts nimmt die Beschleunigung leicht ab, was wahrscheinlich auf eine Änderung der Fluglage auf halber Strecke zurückzuführen ist. Das ist nur im Plot zu erkennen.
Eine Signalreflexion ist am Ende des langen Abbremsungsabschnitts ‘B-C’, von 16:37:55 bis 16:39:30 Uhr, sichtbar. Erläuterungen hierzu finden Sie in Abschnitt 4.3.3, “Signalreflexion”.
4.2.2 Abschnitt C-D
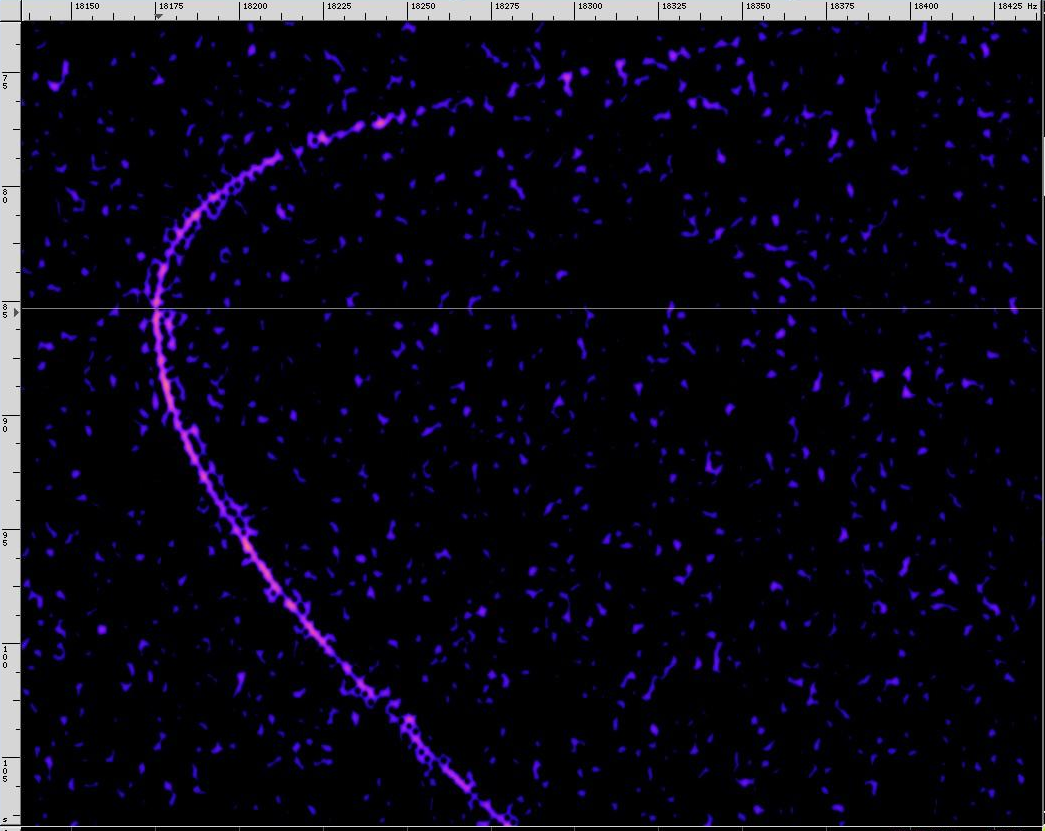
Abb. 2: Neigung des Raumfahrzeugs nach unten, Neuausrichtung ‘C’
Bei “C” richtet sich die Raumfähre neu aus, indem sie nach unten kippt, und es gibt einen kurzen Moment der Nullbeschleunigung, da die Nettobeschleunigung (Schub plus Schwerkraft) vorübergehend senkrecht zur Sichtlinie des Beobachters steht. Mit “C-D” wird die Hauptverzögerungsphase fortgesetzt.
4.2.3 Abschnitt D-E
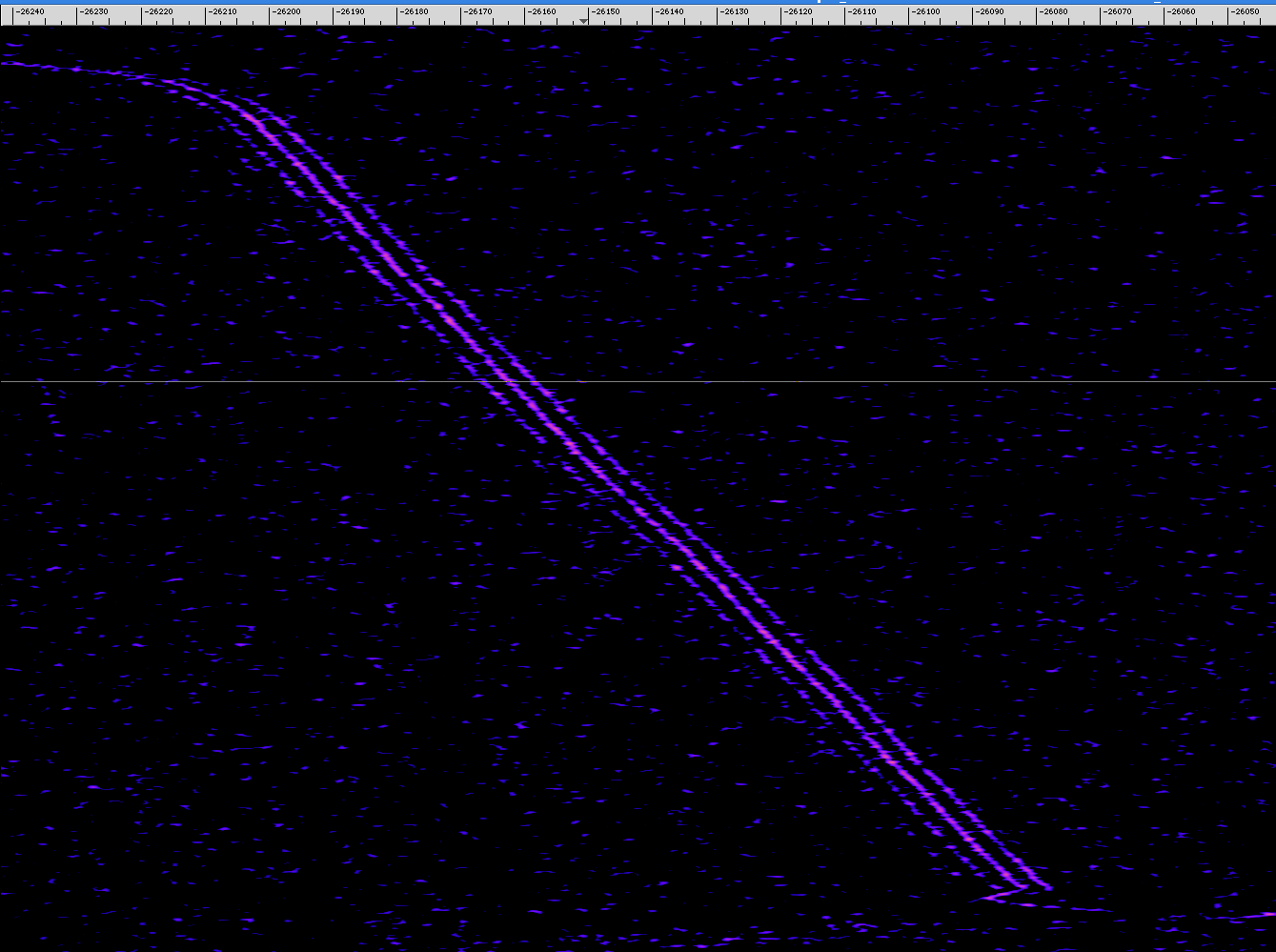
Abb. 03: 4,3-Hz-Seitenband im Abschnitt “D-E
Bei der Vergrößerung von “D-E” sind zwei ausgeprägte Seitenbänder bei ±4,3 Hz zu erkennen. Die Gründe dafür können mit den durch die Haupttriebwerk verursachten Vibrationen in der Struktur zusammenhängen. Diese Vibration kann sich dann auf den TX-Oszillator auswirken. Während des langen Brennmanövers “B-C” ist sie jedoch nicht vorhanden.
Auch im Abschnitt “D-E” ist die beobachtete Beschleunigung sehr gering, als ob das Triebwerk nur die Schwerkraft ausgleichen würde. Es gibt keinen offensichtlichen Grund für diese Maßnahme.
Die geringe scheinbare Beschleunigung ist eher darauf zurückzuführen, dass der Schub- und Schwerkraftvektor fast senkrecht auf der Linie Raumfahrzeug-Erde steht. Der Neigungswinkel würde ~60° nach unten betragen (90° ist senkrecht nach unten).
Die Sonde befindet sich jedoch aufgrund ihrer früheren Geschwindigkeit noch im Sinkflug und ist noch viele Kilometer über der Mondoberfläche.
Dieser Abschnitt ist über 3 Minuten lang und würde zur Feinabstimmung der Abfahrt gehören. Das ändert sich schlagartig bei “E”.
4.3 Unmotorisierter Abstieg Abschnitt E-F
In diesem Zeitraum von 92 Sekunden geschehen mehrere interessante Dinge.
Der Abschnitt “E-F” zeigt eine plötzliche Beschleunigung von 0,655 m/s2 weg vom Beobachter. Dieser Wert stimmt mit dem vertikalen freien Fall überein, der entlang einer Sichtlinie zur Erde in 23,8° Höhe über dem Mondhorizont gesehen wird.
Diese Höhe bedeutet, dass die Sonde etwa 3,3° (99 km) nördlich des Kraterzentrums von Atlas landen würde. (Bei Atlas läge die Höhe der Erde bei 26°).
Die Landung könnte auch im Atlas-Krater stattgefunden haben, allerdings bei einem Neigungswinkel von -86,7° und nicht -90°, also senkrecht nach unten.
Oder irgendwo dazwischen.
4.3.1 Spin-up
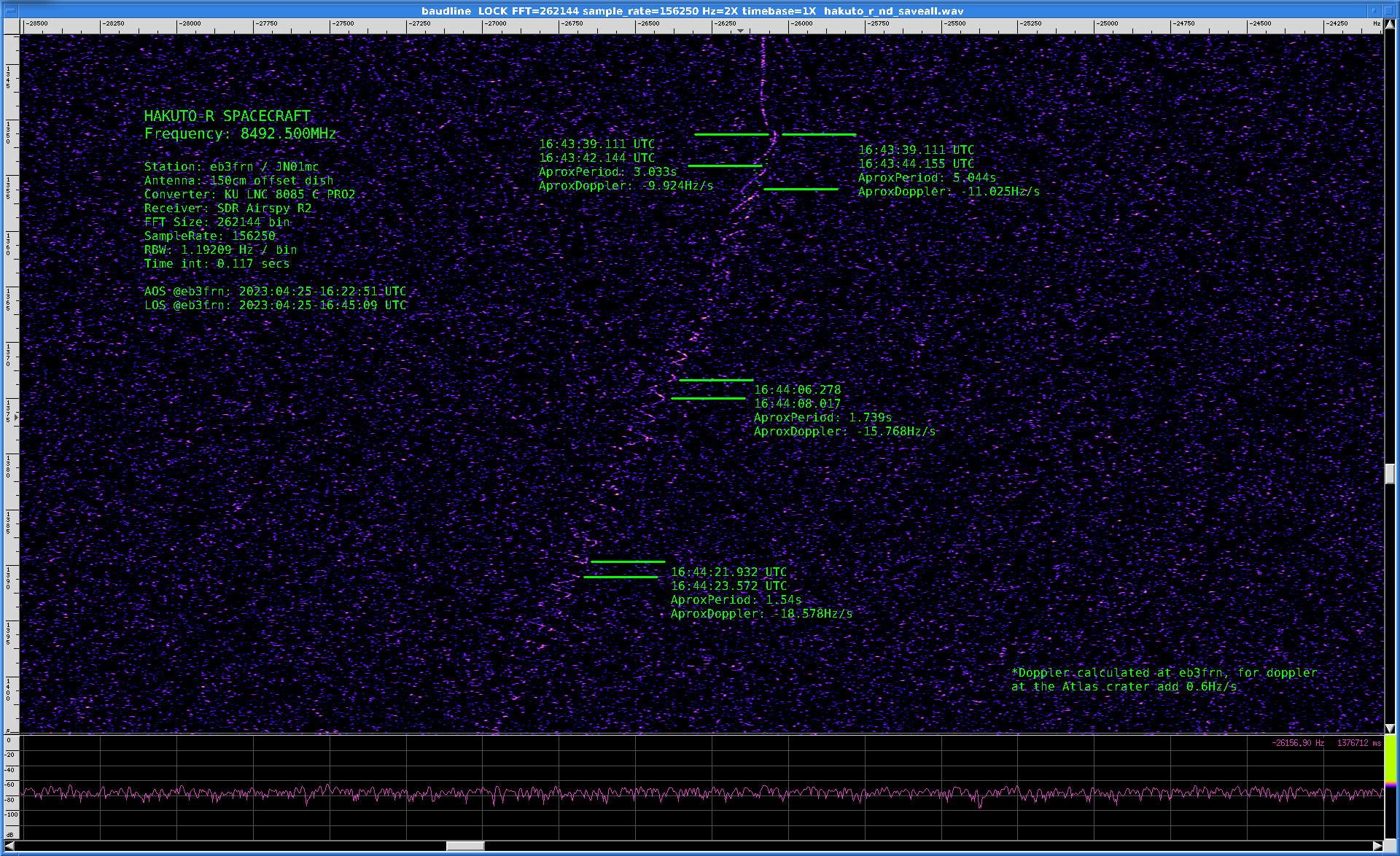
Abb. 04: Trägerfrequenzschwankung während des Freifallabschnitts ‘E-F’
Während 6s um ‘E’ wird das Raumfahrzeug axial auf 40 U/min hochgedreht. Dies ist in der Frequenzkurve zu erkennen. Es zeigt eine Sinuskurve mit einer Frequenzschwankung von 78,6 Hz pk-pk. Auf dem AirSpy-Display ist auch zu sehen, wie die Signalstärke mit einer Periode von 1,5s (40 U/min) in der Amplitude um 5 dB auf- und absteigt. Dies ist auf geringfügige Abweichungen im Strahlungsdiagramm der Antenne und möglicherweise auf Abschattungen zurückzuführen.
Der Spin-up erfolgte schnell bei ‘E’. Dies kann absichtlich geschehen oder eine Folge des unregelmäßigen Verhaltens von Motor und Triebwerk sein. Eine bewusste Entscheidung scheint am wahrscheinlichsten.
4.3.2 Frequenzverschiebung
Die Frequenzverschiebung kann zur Schätzung der Antennenposition auf der Oberseite des Raumschiffs verwendet werden. 78,6 Hz pk-pk und 40 U/min bedeutet, dass die Antennenbewegung (aufgelöst entlang der Sichtlinie zum Beobachter) 0,66 m pk-pk betrug. Wenn man davon ausgeht, dass die Sonde jetzt senkrecht zur Landung steht, beträgt die tatsächliche Antennenbewegung von einer Sonde etwas nördlich des Atlaskraters aus gesehen 0,72 m. Das würde bedeuten, dass sich die Antenne in einem Radius von 0,36 m von der Drehachse des Raumfahrzeugs befindet. Aus den veröffentlichten Zeichnungen geht hervor, dass dies in etwa der Fall ist.
4.3.3 Signalreflexion
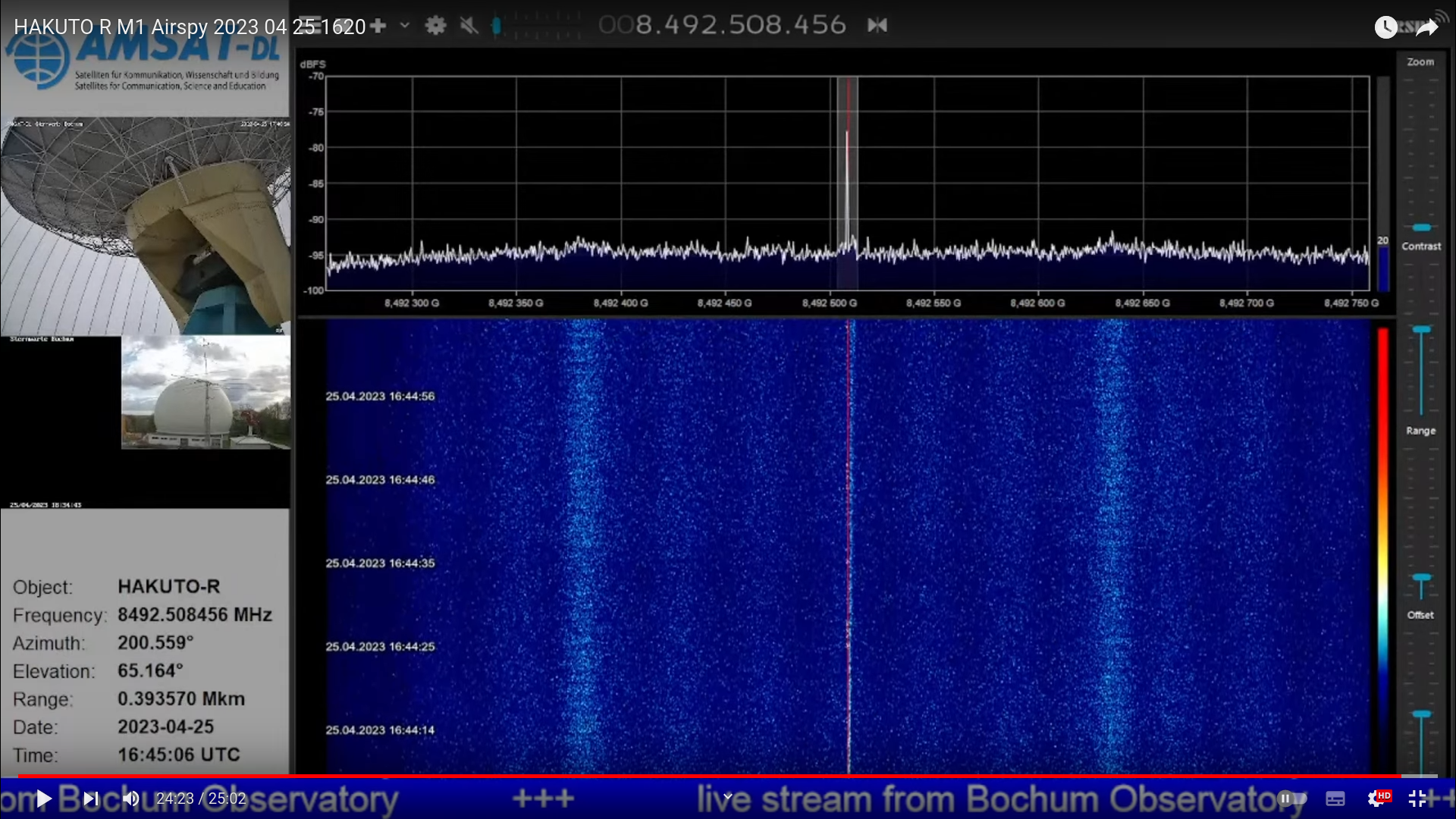
Abb. 05: AirSpy-Wasserfallanzeige mit Signalreflexion.
Ein diffuses Signal wird allmählich rechts neben dem Restträger sichtbar. Aus dieser Beobachtung kann eine Schätzung der vertikalen Geschwindigkeit vorgenommen werden.
Das Signal ist 15-20 dB niedriger als der Träger und der Abstand nimmt mit der Zeit zu. Bei LOS belegt sie eine Bandbreite von etwa 5 kHz.
Dieses Phänomen ist mit der Reflexion des Trägers an der Mondoberfläche vereinbar, da die Reflexionen eine andere Dopplerverschiebung als das direkte Sichtliniensignal aufweisen würden.
Die Oberfläche des Mondes ist rau, so dass die reflektierte Energie in Bezug auf Frequenz und Amplitude schnell schwankt, da sie die Summe von unendlich vielen Elementarreflexionen ist.
Da die Energie diffus ist, gibt es für dieses Phänomen keine spezifische Frequenz, die aufgezeichnet werden konnte. Grob geschätzt liegt der Median bei 3,7 kHz bei LOS, was einer Geschwindigkeitsdifferenz von 130,6 m/s entlang der Sichtlinie zur Erde entspricht.
Unter der Annahme, dass der Abstieg vertikal erfolgt (d. h. keine horizontale Geschwindigkeitskomponente hat), kann diese Geschwindigkeit entlang der Sichtlinie in eine vertikale Geschwindigkeit von 148 bis 161 m/s aufgelöst werden. Die Streuung ist auf die geringe Unsicherheit der Position auf dem Mond zurückzuführen.
Nun würden 88s freier Fall allein aus g = 1,624 m/s2 eine Vertikalgeschwindigkeit von 143 m/s ergeben.
4.4 Abschnitt F
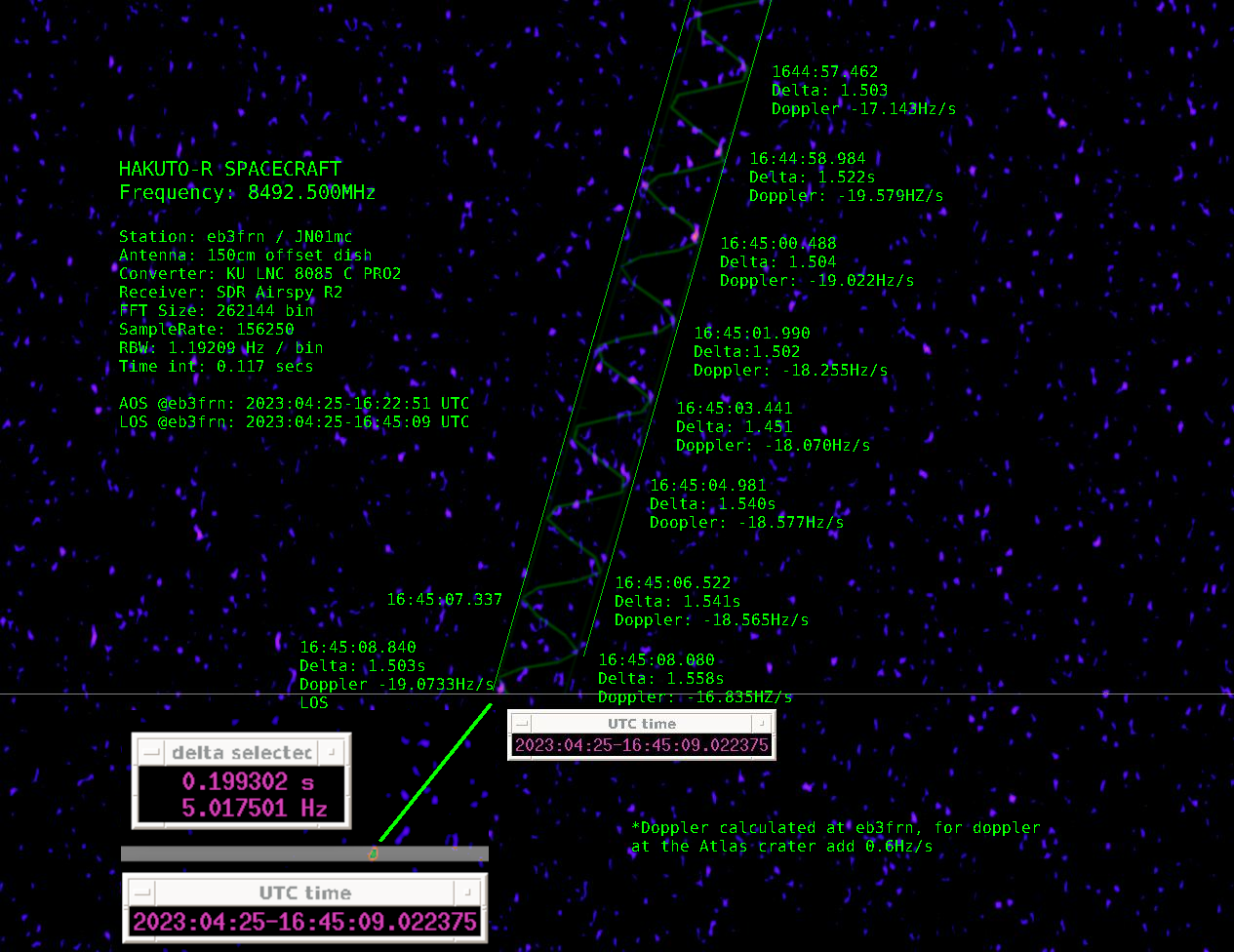
Abb. 06: Nahaufnahme der letzten 12 Sekunden des freien Falls
Das Signal endet abrupt um 16:45:09 Uhr utc, als HAKUTO den Mond trifft.
Aus dem Stand legt ein 88-s-Freifall eine Strecke von 6,3 km zurück. 88s der bestehenden Abwärtsgeschwindigkeit bei E werden zu dieser Fallhöhe hinzukommen.
Ein spektakuläres Epitaph ist in fig06.png zu sehen, das Ergebnis stundenlanger akribischer Forschung von EB3FRN.
5. Schlussfolgerung
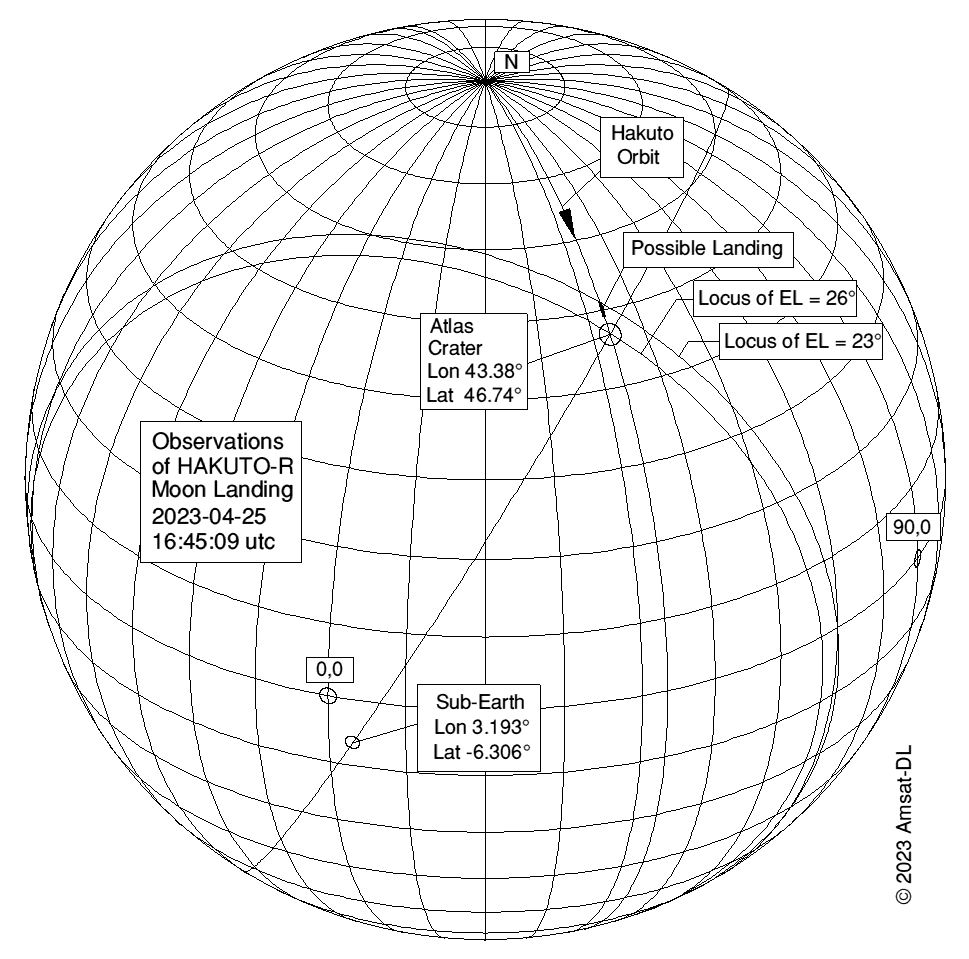
Abb. 07: Diagramm der Positionsbeziehungen beim Mond
Das Profil der Dopplerverschiebung zeigt, dass HAKUTO-R den Mond um 2023-04-25 16:45:09 utc traf.
Auflösen (a) die Beschleunigung im freien Fall und (b) Die Verarbeitung der Spin-Wobbel-Charakteristika deutet darauf hin, dass die Landung ein paar Grad vor dem Atlas-Krater erfolgte, Breitengrad +50°, Längengrad +43°. Siehe fig07.png.
Für die Landung aus einer 100 km langen Mondumlaufbahn ist ein Delta-V des Triebwerks von 1634 m/s erforderlich. Wir gehen davon aus, dass das Missionsmanagement wusste, dass der verbleibende Treibstoff für eine sanfte Landung nicht ausreicht und sich darauf vorbereitet hat.
Veröffentlicht: 2023 Mai 15 (Ausgabe 4)
Aktualisierung 2023-05-23
HAKUTO-R M1 wurde vom LRO-Team geortet: http://lroc.sese.asu.edu/posts/1302
Aktualisierung 2023-05-26
ispace veröffentlichte heute ihre Ergebnisse: Ergebnisse der Mondlandung der “HAKUTO-R” Mission 1:
“Während des Abstiegs kam es zu einem unerwarteten Verhalten bei der Höhenmessung des Landers. Während der Lander seine eigene Höhe auf Null oder auf der Mondoberfläche schätzte, wurde später festgestellt, dass er sich in einer Höhe von etwa 5 km über der Mondoberfläche befand. Nach Erreichen der geplanten Landezeit setzte der Lander seinen Sinkflug mit geringer Geschwindigkeit fort, bis dem Antriebssystem der Treibstoff ausging. Zu diesem Zeitpunkt wurde der kontrollierte Sinkflug des Landegeräts abgebrochen, und es wird angenommen, dass es im freien Fall auf die Mondoberfläche stürzte” – was nicht allzu weit von unserer obigen Schlussfolgerung entfernt ist!
Bildquellen: Abb01,02,03,04,06 EB3FRN; Abb05 EA4GPZ; Abb07 G3RUH.

